一 方波控制
- 通过霍尔传感器获得电机转子的位置,然后跟据转子的位置在360度的电气周期内,进行六次转向(每60度换向一次)。每个换向位置电机输出物定方向的力,因此可以说方波控制的位置精度是电气60度。由于在这种方式控制下,电机的相电流波形接近方波,所以叫方波控制
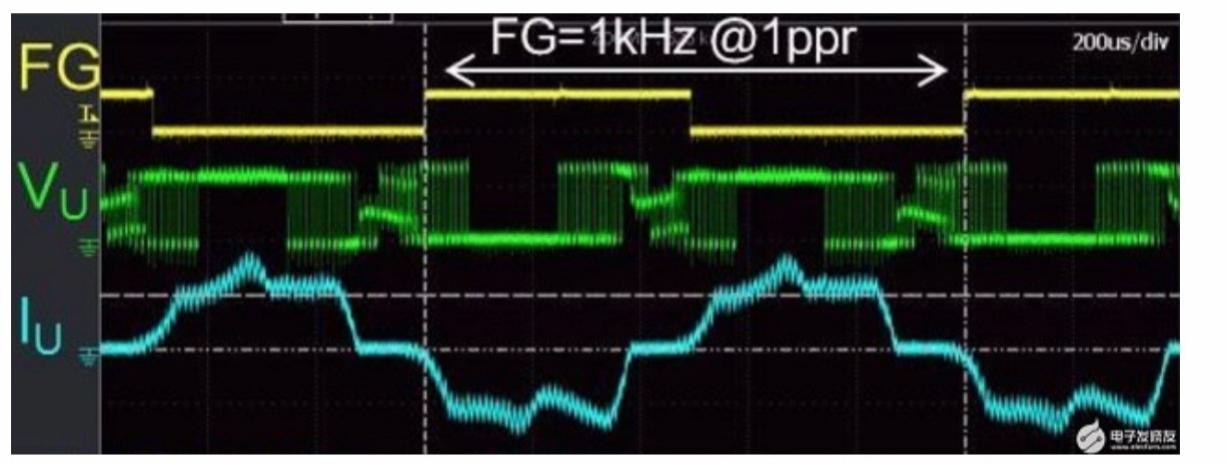
- 特点
价格便宜,驱动器算法简单,开发难度低,开发成本低,硬件成本相对较低
加减速简单粗暴,类似于猛踩油门,但也容易过冲
匹配电机简单,对电机的相位,相电感,相电阻要求低
二 正统波控制
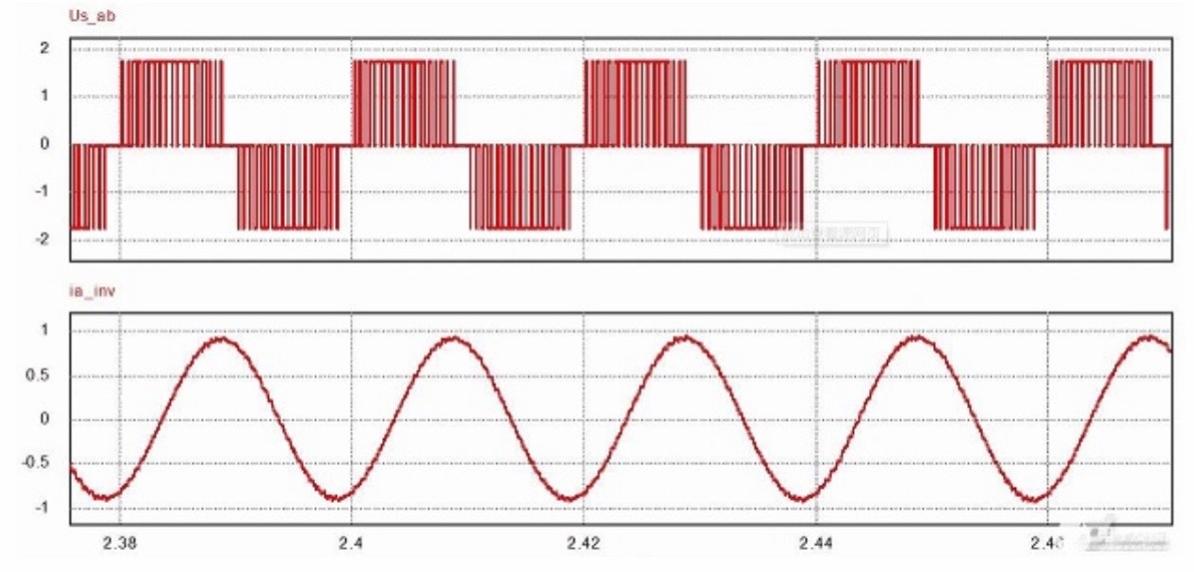
- 使用的是SVPWM波形,输出的是三相正弦波电压,电机相电流为正弦波电流,可以认为在一个电气周期内进行了多次的连续变化换向,无换相电流突变。显然,正弦波与方波相比,其转矩波动较小,电流谐波小,控制起来感觉较“细腻”。
- 特点
运行平稳,转矩波动小,运行效果顺畅,不易受负载变动而波动
稳定可靠,使用寿命长(正弦波控制避免了产生尖峰电流的冲击,而方波控制易产生尖峰电流,对MOS管及电机进行竞击,影响了寿命。)
安静,噪音小。电机运行时,方波控制可明显听到“吱吱吱”的电流声,弦波控制电流声极小。
效率高。正弦波控制比方波控制电机的使用效率高,输出同等功率所需的电流更低。
算法难度高,成本比方波控制相对高一点。
三 如何选择
- 对运行效果,性能,稳定可靠性没有太高要求,追求低成本的。选方波驱动器
- 要求运行效果好,稳定可靠,静音,耗电低,效率高的。选正弦波驱动器
